IC555でPWM制御回路を作る
- LEDの明るさ、DCモータの出力を可変させたい方
- IC555でPWM制御回路を作りたい方
- IC555でサーボモータを動かしたい方
555タイマーICを使ったPWM制御回路をいくつか紹介していきたいと思います。
ネット上にはいくつかの555タイマーICを使ったPWM制御回路が紹介されています。それらの回路を実際に組んでみてPWM制御の時に気になる周波数やDuty比といった特性をオシロスコープを使って確認してみました。
回路図とブレットボードでの配線写真も掲載しますので参考にしてみてください。
- 周波数(30~150Hz)でのPWM制御回路
- 周波数(10~50KHz)でのPWM制御回路
- 周波数(50~300KHz)でのPWM制御回路
- まとめ
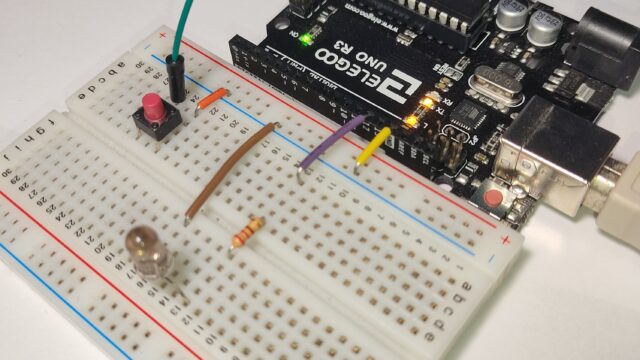
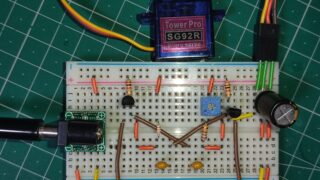
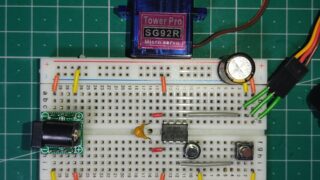
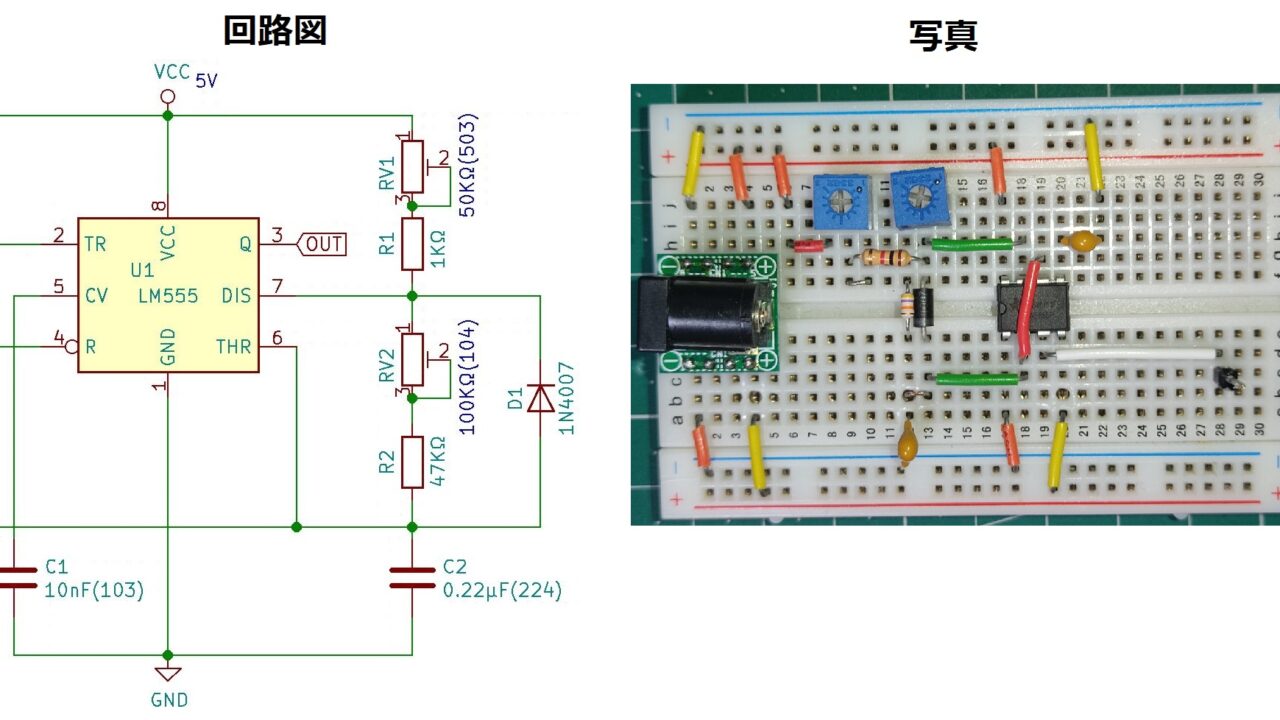
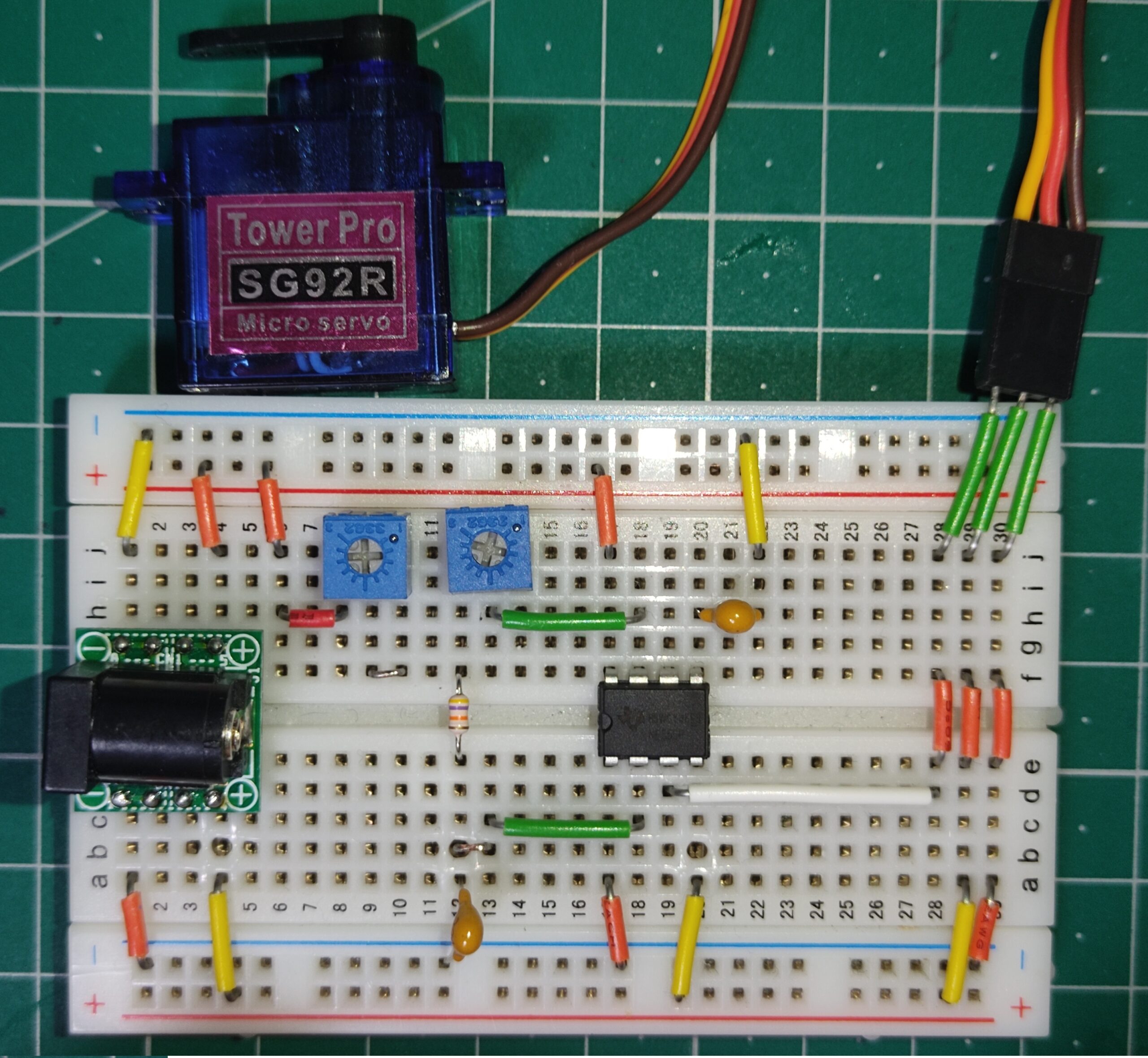
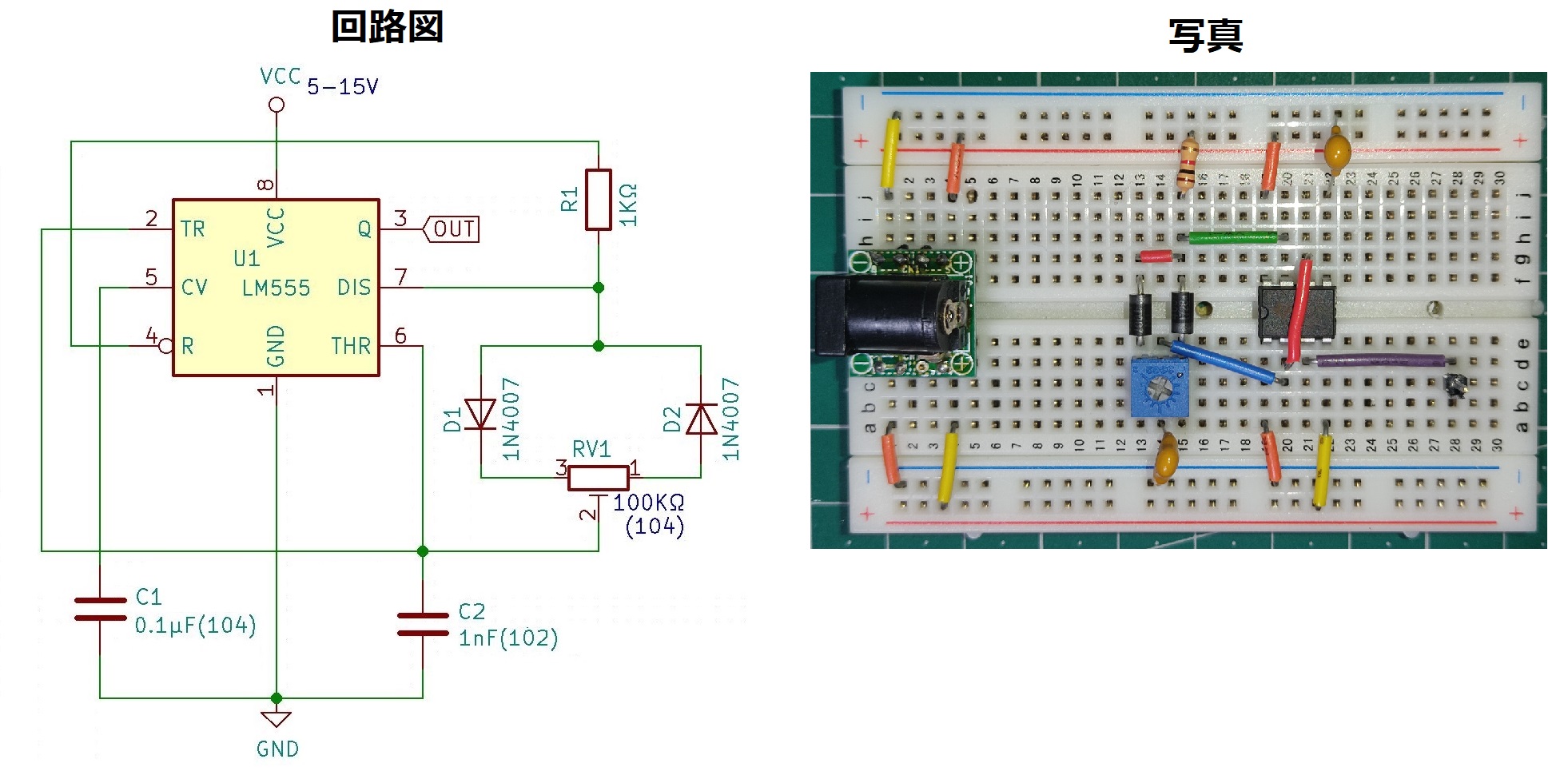
周波数(30~150Hz)でのPWM制御回路
私がIC555を使ってサーボモータを動かく時に使う回路になります。
SG90といったサーボモータを制御する波形は波長20ms(周波数50Hz)の低周波数でパルス幅(HIGH時間)が0.5~2.4msと短いです。
下記回路を使えばサーボモータを自由に動かくことができます。
| Duty比 | 3~30% | 主にRV1(503)で調整 しかし、RV2(104)でも若干変化あり |
| 周波数 | 34~150Hz | 主にRV2(104)で調整 しかし、RV1(503)でも若干変化あり |
| パルス幅 | 0.2~9ms | RV1(503)で調整 |
当回路は可変抵抗2つで周波数やパルス幅、Duty比を変えることができます。
写真になる2つの可変抵抗のうち左にあるのが回路図上のRV1、右にあるのがRV2となります。
主にRV1を調整することでDuty比(パルス幅)をコントロールし、RV2を調整することで周波数をコントロールできます。
しかし、若干ですがRV1を動かすと周波数も一緒に変化したり逆にRV2を動かすとDuty比も一緒に変化したりするため、周波数固定でDuty比のみを変える制御はできません。
サーボモータの場合、周波数が多少ズレても問題なく動くため、最初にRV2で周波数を50HzにしてからRV1の抵抗値を可変させるとサーボモータが動きます。
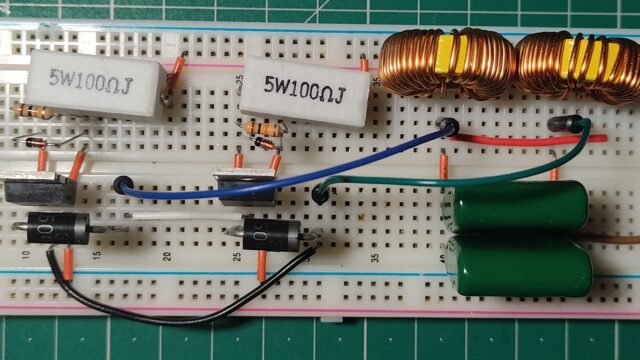
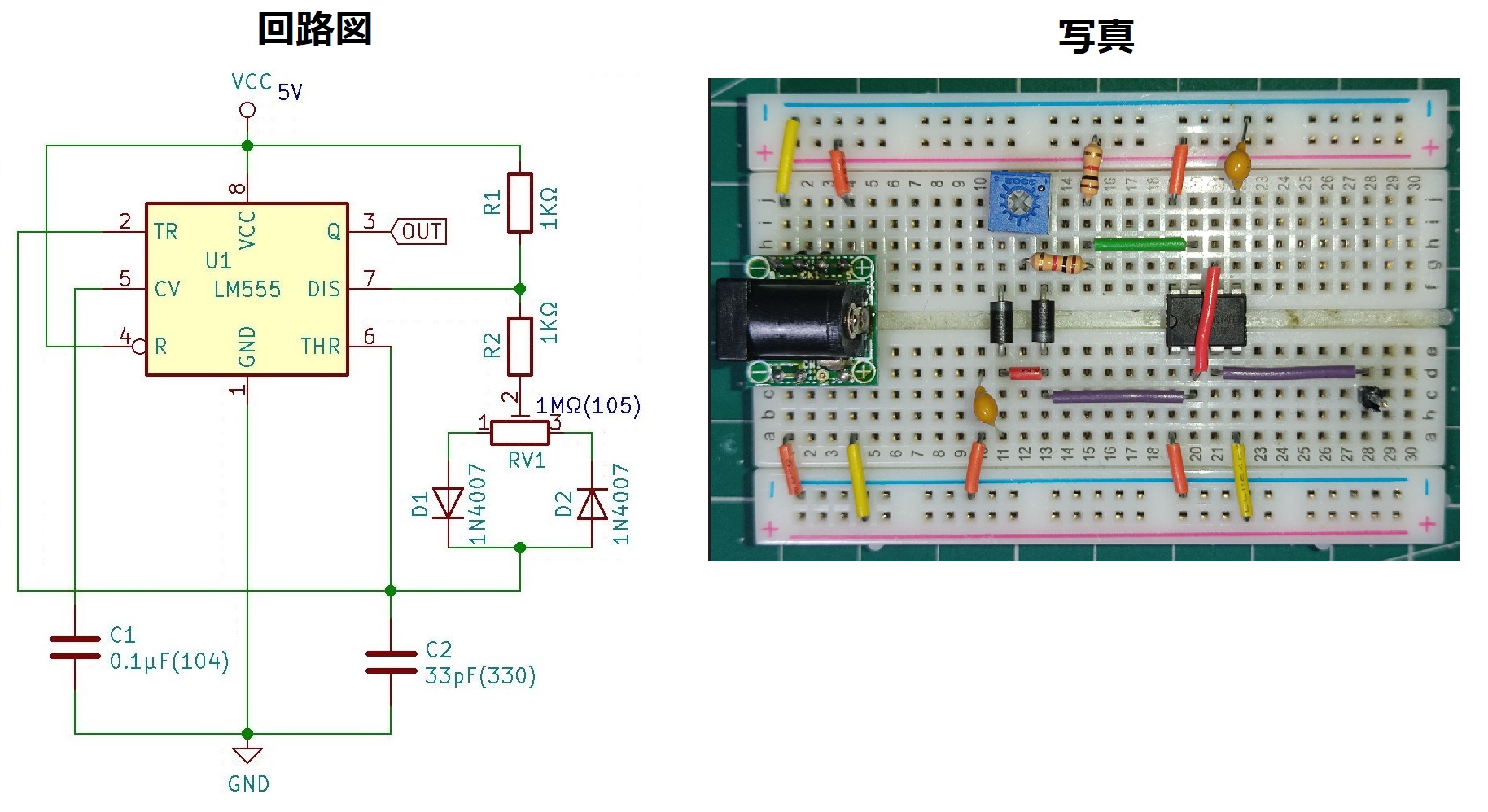
周波数(10~50KHz)でのPWM制御回路
次に紹介する回路は秋月電機様で販売されている「PWM(スイッチング)方式DCモーター速度可変キット」を参考に作成した回路になります。
http://akizukidenshi.com/download/ds/akizuki/AE-555PWM_man_rev2.pdf
| Duty比 | 7% | ~ | 50% | ~ | 98% |
| 周波数 | 43KHz | ~ | 11KHz | ~ | 29KHz |
| パルス幅 | 1.6μs | ~ | 44μs | ~ | 34μs |
周波数が10KHz以上の周波数が出ているためLEDに使用したときにもチカチカせずに問題なく明るさ調整できます。
こちらの回路もDuty比を変えようとすると周波数も変わってしまいますが、モーターの速度調整やLEDの明るさ調整などの出力制御系の使い方でしたら問題なく使うことができるかと思います。
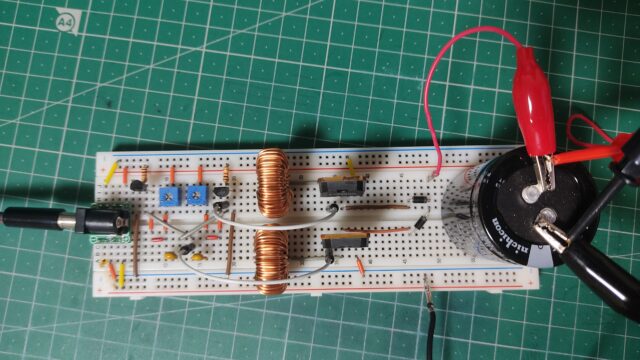
周波数(50~300KHz)でのPWM制御回路
最後に紹介するのは「サレジオ工業高等専門学校 ものづくり講座」で紹介された回路になります。
http://www.ee.kochi-ct.ac.jp/~enomoto/kgrsr/hardware/data/04_pwm_timer_ic.pdf
| Duty比 | 22% | ~ | 50% | ~ | 96% |
| 周波数 | 300KHz | ~ | 50KHz | ~ | 125KHz |
| パルス幅 | 700ns | ~ | 10μs | ~ | 9μs |
2個目に紹介した周波数(10~50KHz)の回路よりも高周波数の時に使えると思います。
難点としては低いDuty比が出せない点です。
各抵抗やコンデンサの大きさを変更すれば低いDuty比も出せると思いますが、IC555の仕組みの理解と計算が必要になると思います。
まとめ
どの回路でも周波数を固定して、Duty比を変えることは難しいようです。しかし、サーボモータの制御やモーター、LEDの出力制御はIC555でも問題なくできることがわかりました。
今回紹介した回路も各抵抗やコンデンサの大きさを変更すれば周波数やDuty比の特性も変わってきます。
今後は、IC555の仕組みの理解した上で任意の波形を出せるように勉強していきたいと思います。
最後に回路図を設計しネットにアップしてくれている方々に感謝を述べたいと思います。