無安定マルチバイブレータ回路でサーボモータを動かす

- 安く簡単にサーボモータを動かしたい方
- 無安定マルチバイブレータ回路のことを知りたい方
本記事では無安定マルチバイブレータ回路を使ってサーボモータを動かしていきます。無安定マルチバイブレータ回路は部品点数も少なく、マイコンなどの高い部品がなくてもサーボモータを動かすことができます。
安くサーボモータを動かしたい方にはおすすめの方法です。
- サーボモータSG92Rの仕様
- 無安定マルチバイブレータ回路とは
- 無安定マルチバイブレータ回路の動き
- 無安定マルチバイブレータ回路の計算
- サーボモータの制御
サーボモータSG92Rの仕様
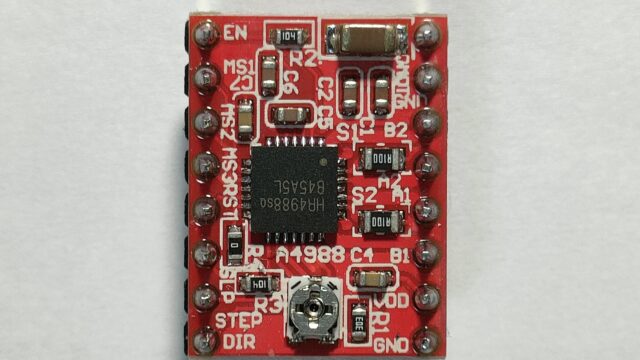
今回は「SG92R」というサーボモータを動かしていきたいと思います。
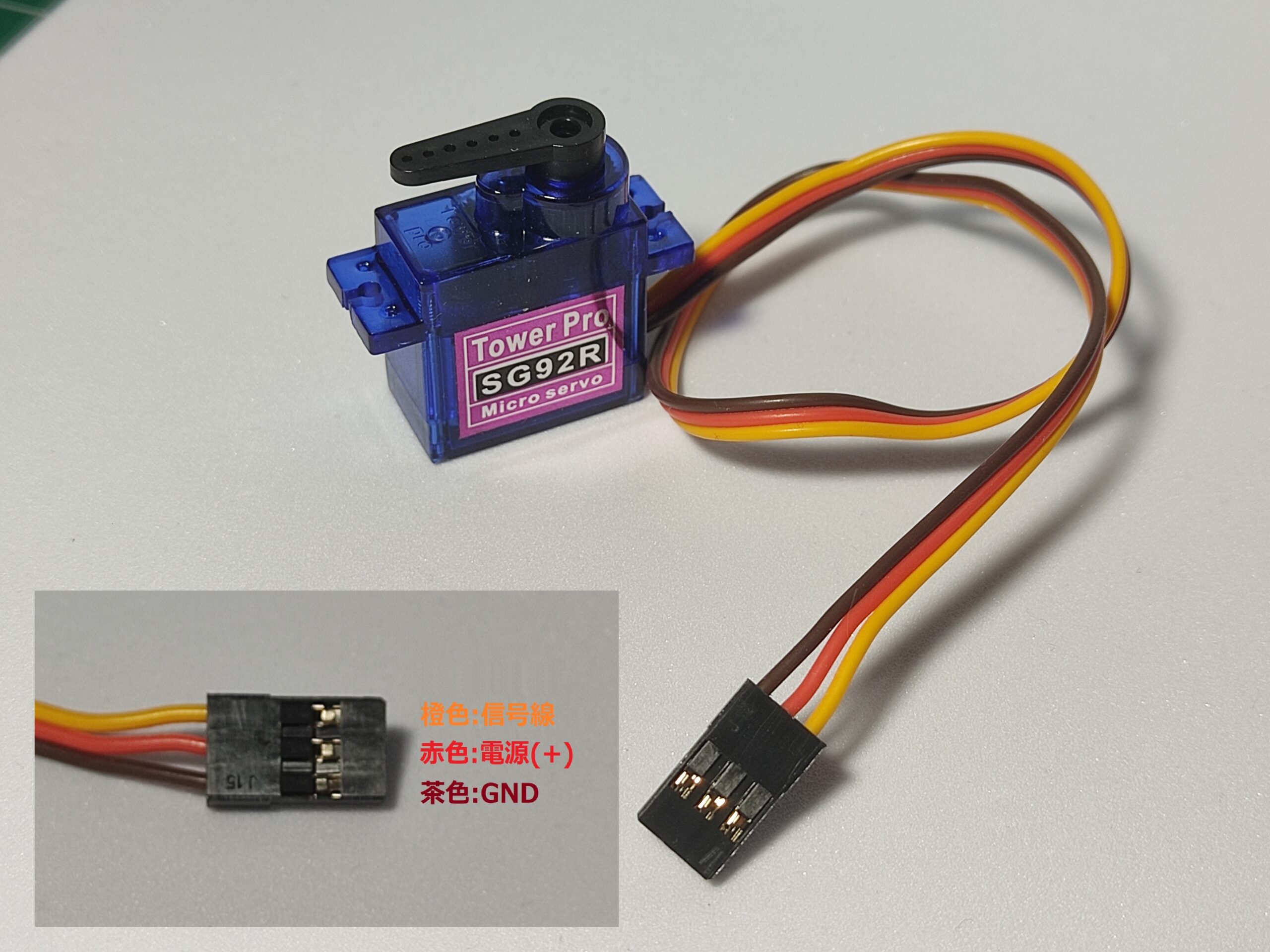
SG92Rは橙色の配線に制御信号を入力することで角度を指定します。
各スペックは下記の通りです。
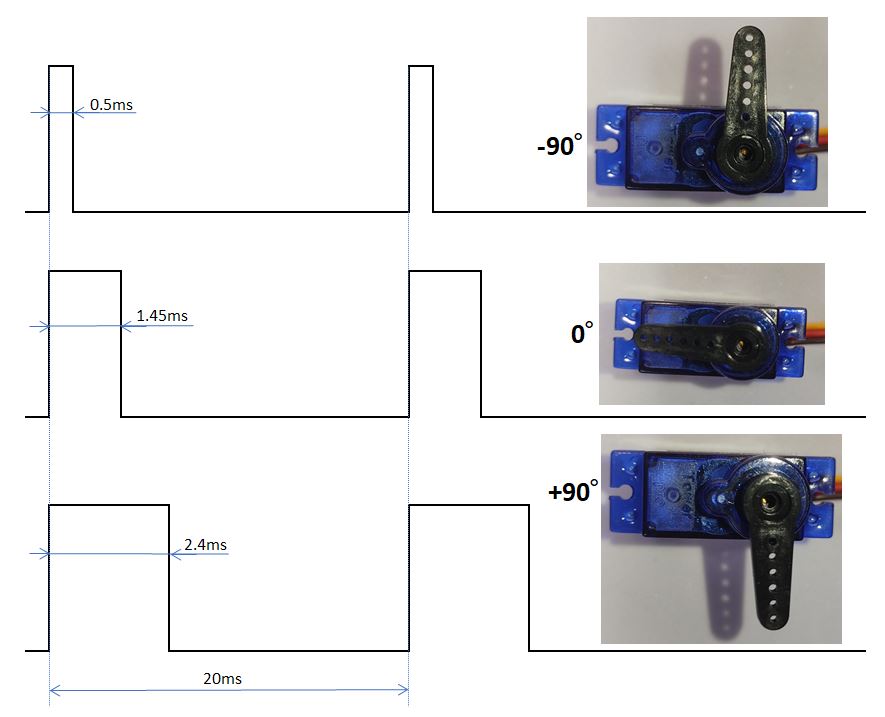
- PWMサイクル:20ms
- 制御パルス:0.5ms~2.4ms
- 制御角:±約90°(180°)
- 配線:茶=GND、赤=電源[+]、橙=制御信号 [JRタイプ]
- トルク:2.5kgf・cm
- 動作速度:0.1秒/60度
- 動作電圧:4.8V
- 温度範囲:0℃~55℃
- 外形寸法:23×12.2x27mm
- 重量:9g
スペックに書いてあることから
20msに1サイクル(周期20ms)のPWM波形(50Hz)を作り、HIGHとなる部分の長さ(パルス幅)を0.5ms~2.4msと変化させることにより -90°~+90° の合計 180°動く角度を変化させられることがわかります。
無安定マルチバイブレータ回路とは
無安定マルチバイブレータ回路はトランジスタを使った発振回路の一種で2つのトランジスタを抵抗とコンデンサでたすきがけのように接続する回路です。
2つのトランジスタが互いにON/OFFを繰り返すことで発振動作をします。
使用する抵抗及びコンデンサの容量で周期、パルス幅 及びduty比などを操作できます。
ICやマイコン等を使わないため低価格でサーボモータを動かすことができます。
無安定マルチバイブレータ回路の動き
無安定マルチバイブレータ回路の動作の流れを見ていきたいと思います。
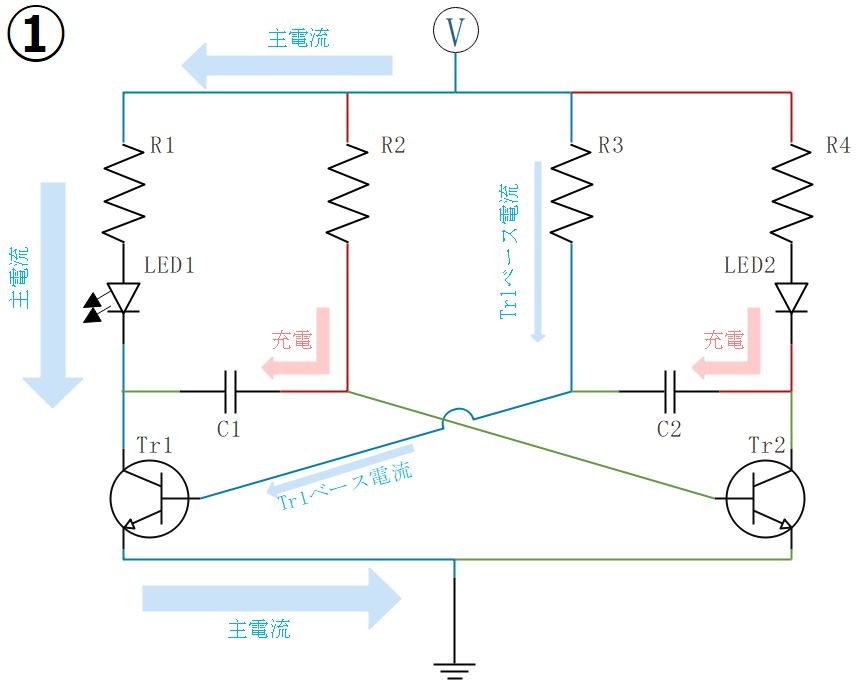
①の図のようにR1に主電流が流れている状態からスタートとします。
各抵抗を流れる電流は
- R1:主電流が流れている
- R2:C1を充電
- R3:Tr1のベース電流
- R4:C2を充電
となります。
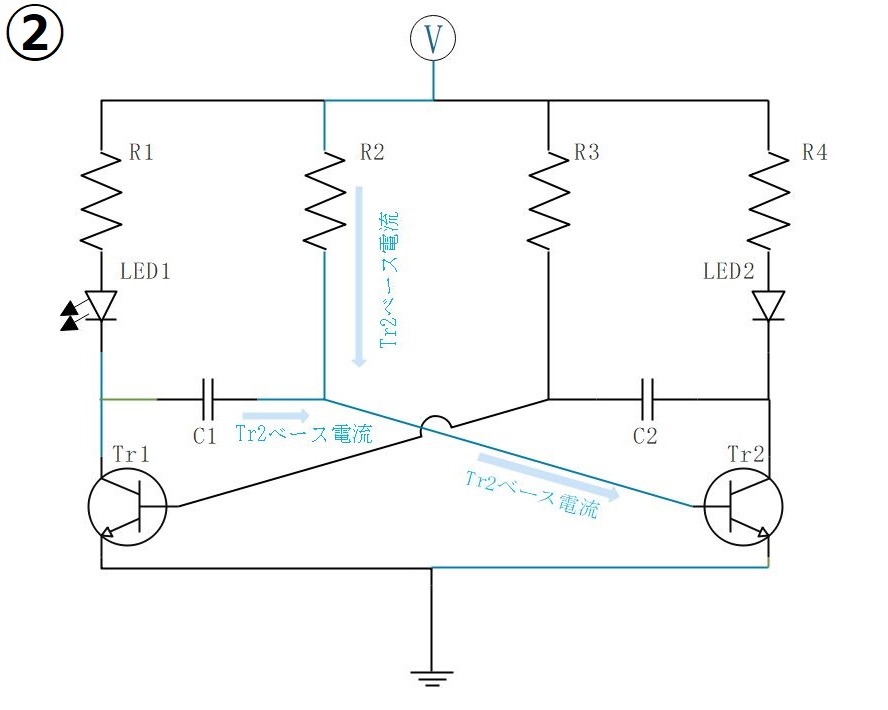
②の図ではC1の電圧がTr2がONになる電圧に達したとを表しています。電源やC1からTr2のベースを電流が流れ、Tr2がONします。

③の図ではTr2がONすることでR4に電流が流れるようになり、同時にC2に充電されていた電気も主電流とともにGNDへ流れます。

④の図ではC2の電気が流れ出てしまったことで、C2の両端に電圧が生まれ先ほどとは逆側にC2の充電が始まります。
C2の充電が始まると電流がTr1のベースに行かなくなるためTr1がOFFとなります。
こうして①の図とは鏡合わせの状態となりました。
この動きを繰り返すことでトランジスタが互いにON/OFFを繰り返いします。
また、抵抗器R2,R3とコンデンサC1,C2の容量を変えることでまた、抵抗器R2,R3とコンデンサC1,C2の容量を変えることでを操作できます。
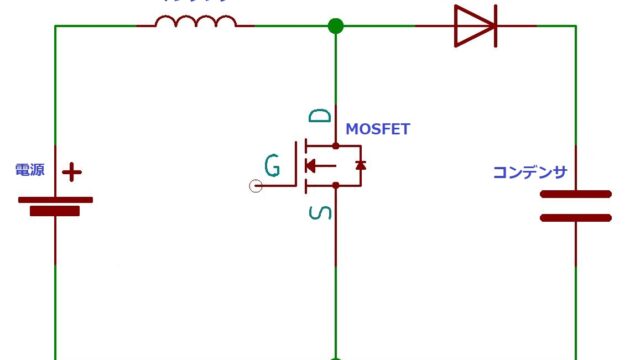
無安定マルチバイブレータ回路の計算
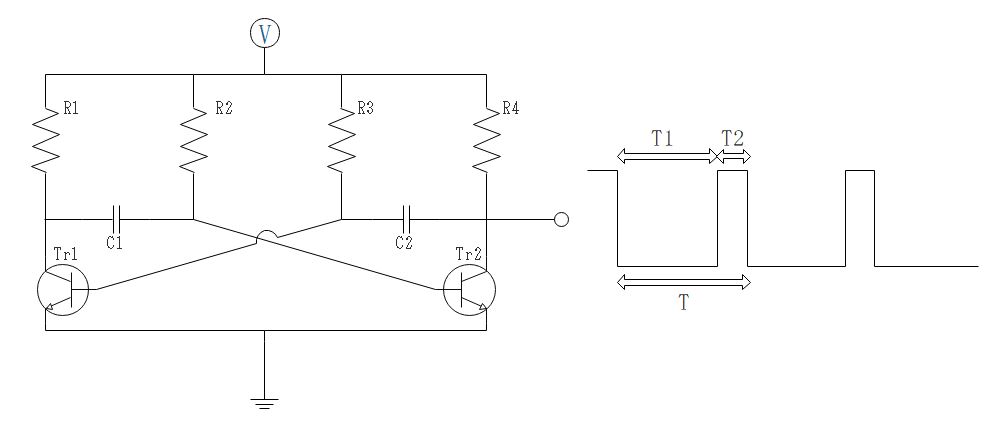
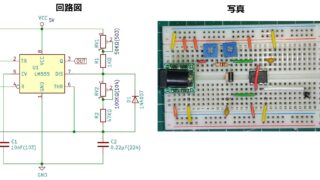
上記回路から回路図の右にある波形が出力されているとします。抵抗器R2,R3及びコンデンサC1,C2と周波数の関係は下記の式によってあらわされます。
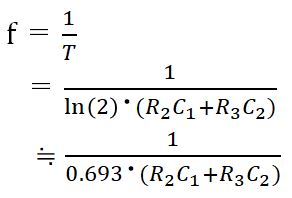
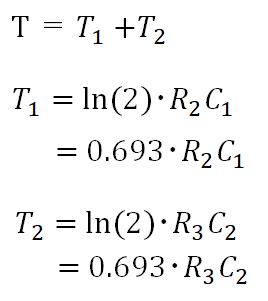
また、周期T及びパルス幅T2、パルスがOFFになっている長さT1の関係は下記の式で表されます。
サーボモータの制御
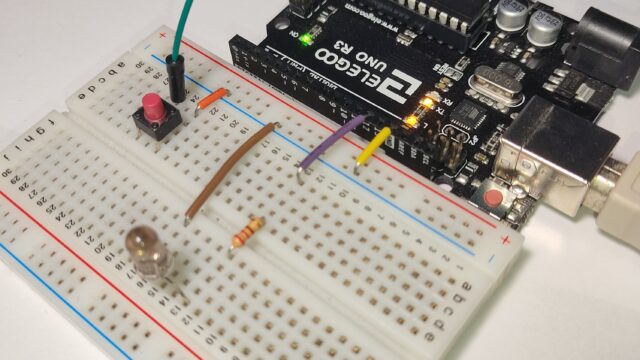
無安定マルチバイブレータ回路とサーボモータの配線は下記のようになります。
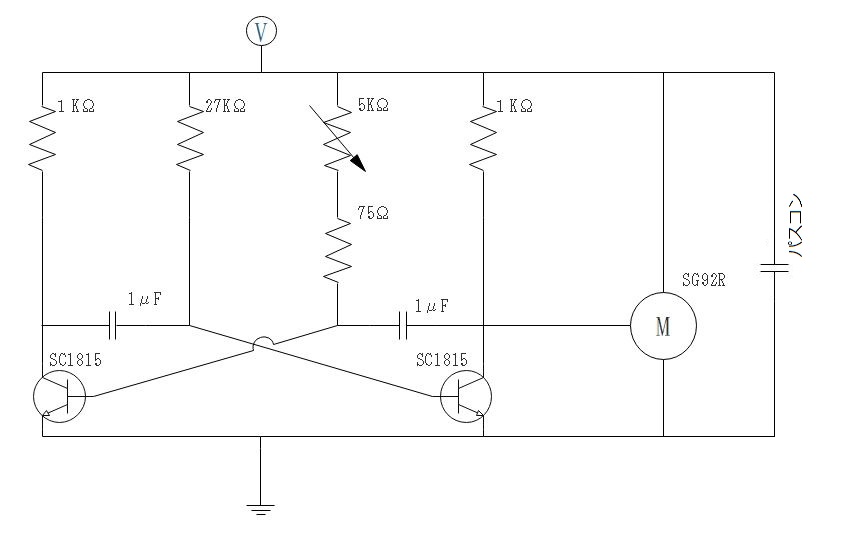
5KΩの可変抵抗を回すことにより前章の計算で求まられるパルス幅T2を変化させ、サーボモータを任意の角度にすることができます。
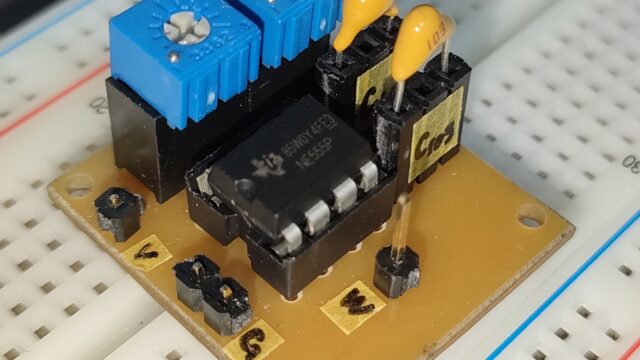
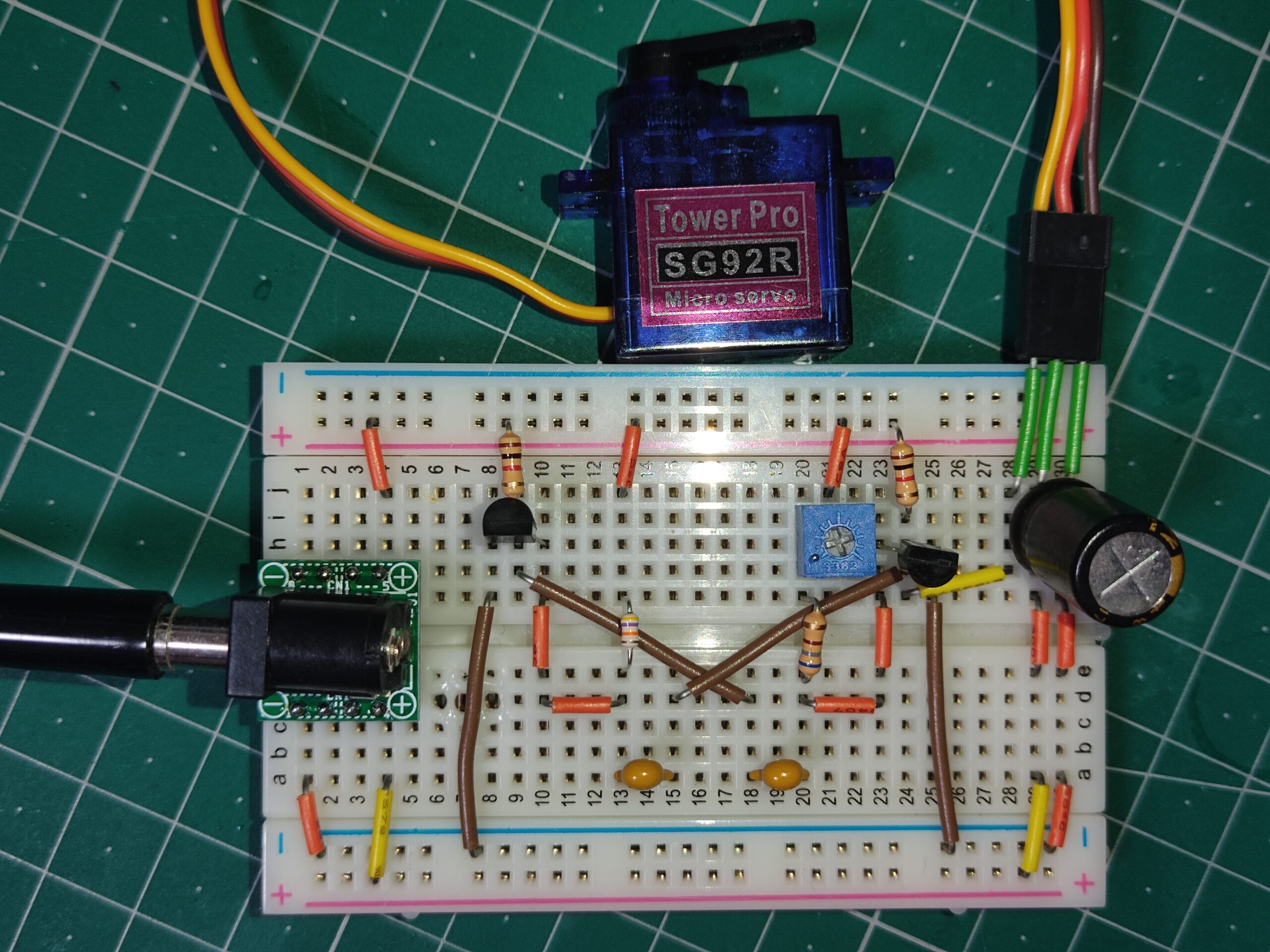
配線時の写真を下記に示します。
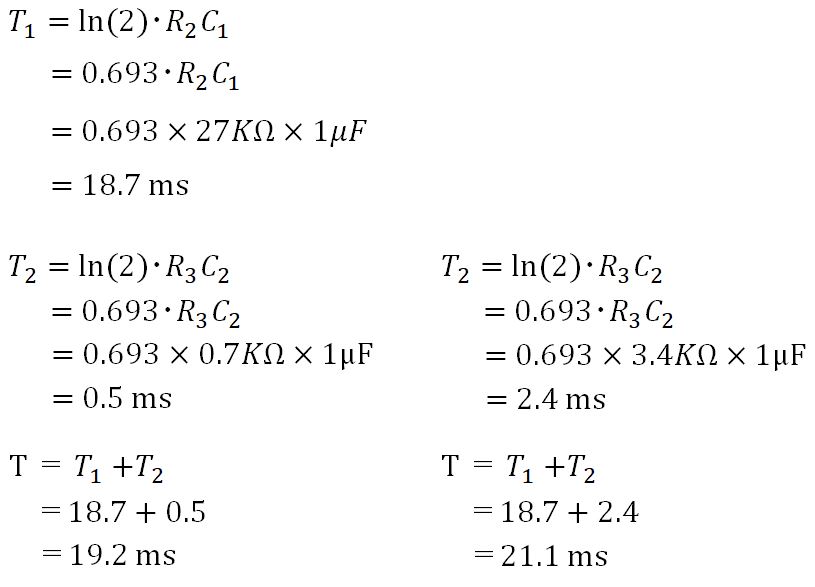
計算上、理想のR2抵抗値は前後の27KΩですが、手元になかったので47KΩを使用しました。R2の抵抗値を47KΩにした場合は下記のような計算になります。
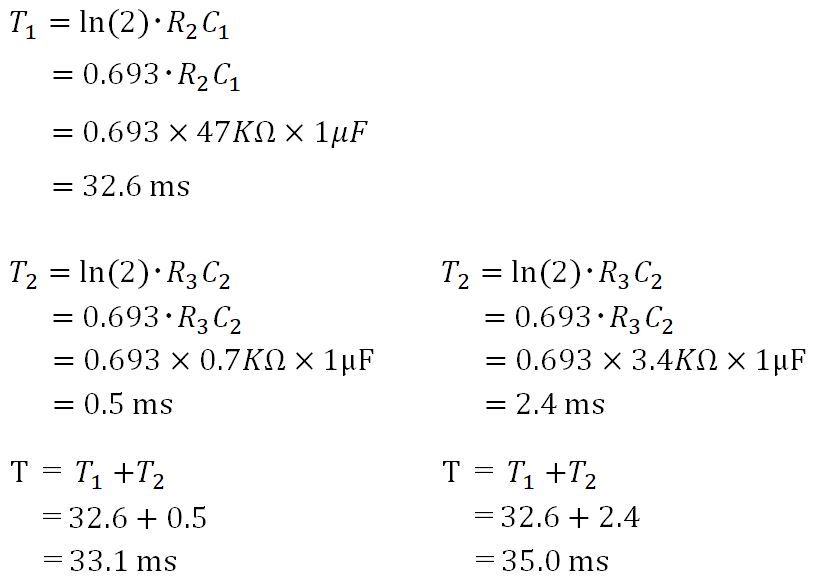
パルスがOFFになっている長さT1は少しずれたぐらいではサーボモータは動くようです。